A Brief Introduction to Matrix Operations
A matrix is usually defined as an array of numbers that
may be treated as an algebraic
object. Usually we refer to a number (m) of horizontal rows and (n) vertical
columns.
The dimensionality of the matrix is given by m×n. A vector is a special case
with only a
single column or row. A column vector is a 1×n matrix.
A common type of operation is already familiar to you. Consider 3 equations in 3
unknowns
This system can be readily solved to find the values of x ,
y and z. It an also be written in
matrix form as 
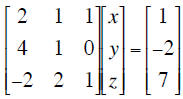
where the unknown scalar terms (x, y and z) are
collected into a column vector x. Sometimes vectors are written with an arrow overbar,
sometimes in bold type. In this case the 3×3 matrix A is often called the
coefficient
matrix. If there are as many equations as unknowns A will be square.
The rules for multiplying a matrix and a column include:
1 dimension must be the same, and the operations proceed element by element.
We multiply two vectors to produce a the “inner product”:
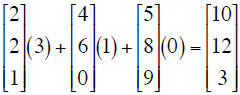
Multiplication of a 3×3 matrix by a 1×3 column vector is done one row at a time:
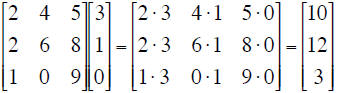
An easy way to do this calculation is by treating each
element of the column
vector as a scalar and multiplying each column of the square matrix, then
summing to get
the resultant column vector:
Note: for matrices, the associative law holds: A× (C×D)
= (A×C) ×D but not the
commutative law: A×B ≠ B×A. It is also useful to define the identity
matrix I:
where any matrix B×I = B. Yu can easily check this.
Now, back to the system of 3 equations in 3 unknowns. To solve it, we would
normally
subtract 2 times the first equation from the second, then
subtract -1 times the first equation from the third, then
subtract -3 times the second equation from the third
The multipliers used (2, -1, -3) are known as pivots.
In matrix form the process is known as Gaussian elimination , and we would end up
with
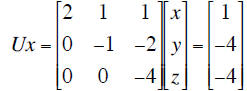
where U is an “upper triangular” matrix.
This system would be easy to solve for x, y, z by back substitution beginning
with
z = -4. At the same time there is a matrix L (lower triangular) for which
A = LU. In this
case
note that the entries below the diagonal are the pivots we
encountered above. The diagonal terms are those of the identity matrix.
Decomposing a
matrix into these upper and lower triangular terms is known as “LU
factorization”.
Transpose: this is a common operation, and boils down to exchanging the columns
of one
matrix for the rows of another:
If  then
then
For a vectors, a m×1 row vector is transposed to form a
1×n column vector.
In MATLAB, type:
 the apostrophe is the
tranpose operator
the apostrophe is the
tranpose operator
Inverse: the inverse of a matrix is of great importance.
For a matrix A, we often write the
inverse as A-1. A matrix has an inverse if A × A-1= I. The matrix inverse is usually found
by the Gauss-Jordan method. Any linear algebra textbook will give the algorithm,
which
is a simple extension of the pivot technique.
Why do we care about the inverse of a matrix?
One reason is that a fundamental operation in numerical computation is solution
of
systems of equations of the form Ax=b for the vector of unknowns x. A solution
is:
x = A-1b so the inverse of A holds the key to the solution.
In MATLAB
 |
(I used the transpose operator to save typing 3
different rows. Instead, I typed 1 row with 3 columns and then transposed it to give “b” correctly as a column vector) |
and this is the correct solution to our system of 3
equations in 3 unknowns (x=-1, y=2,
z=1). This type of problem is known as an “inverse” problem: if we know the
coefficients
for a system (A) and we know the “output” (b) then we can solve for the unknown
terms
x by calculating the inverse of A.
There is an easier (and numerically faster) way to do this in MATLAB using the
“reverse
division ” operator, \.
This avoids the syntax associated with the matrix inverse,
and is actually carried out in
fewer operations and thus less CPU time. Most of the time this won’t matter, but
for
some problems it actually does.
Computers solve problems like this with astonishing speed. Numerical methods may
be
thought of as a family of techniques designed to represent problems we need to
solve,
like our box model equations or a diffusion equation, in terms of simple if
highly
repetitive algebra such as the problem Ax=b. Some of the most sophisticated
numerical
algorithms for systems of both ordinary and partial differential equations boil
down to
expressing the equations in terms of linear or more often non-linear algebraic
equations
that can be solved by executing many rapid elementary steps. MATLAB is full of
such
features, and we’ll learn to use a few to solve some of the problems we run
across.
| Prev | Next |