Systems of Linear Equations
Given a system of equations

we wish to find all solutions. The equations are said to be inhomogeneous
since the constants on the
right hand side are not 0. Associated with this system is a homogeneous system
( called the reduced
homogeneous system of the original system) given by

In matrix notion the inhomogeneous and the homogeneous systems are
represented by Ax = b and
Ax = 0 respectively.
We note that set of solutions of the homogeneous system has a special form.
THEOREM. The set of solutions of the homogeneous system of equations Ax = 0
is a subspace of

REMARK. The set of solutions of Ax = 0 is called the null space of A
or the kernel of A and is
denoted by Null A or ker A
PROOF. If y and z are in K = Null A, we must show that ay + bz is also in K
in order to show that K
is a subspace of
.
We just test this out by the defining property of K , viz., that A annihilates
each
vector of K. Here, to test this out we use some properties of matrix
multiplication . We have that
A(ay + bz) = aA(y) + bA(z) = a0 + b0 = 0.
So ay + bz is in K and thus K is a subspace. Q.E.D.
The theorem governing the relation of an inhomogeneous system and its
associated homogeneous
systems is the following:
THEOREM. Let Ax = b be a system of equations. Let S be the set of all
solutions of the reduced
homogeneous system Ax = 0. Let xp be one particular solution of the original
system Ax = b. Then

is the set of all solutions of the system Ax = b.
PROOF. First let y ∈S. Then we have that y + xp
is a solution of Ax = b since

Now let z be a solution of Ax = b. Then we have that

So we have that y = z - xp is a solution of Ax = 0 and thus y
∈S. This means that z has the desired
form z = y + xp. Q.E.D.
If we can find the one particular solution xp of Ax = b by some method even
by guessing, we
would just have to produce all solutions of the associated homogeneous system Ax
= 0 and add x p to
all solutions of Ax = 0 to find all solutions Ax = b. This is the content of the
preceding theorem.
However, our method of Gaussian elimination to upper triangular form from which
the solutions are
read off produces all solutions of the inhomogeneous system at one stroke
EXAMPLE. Solve for all solutions the system of equations
SOLUTION. We write down the Gaussian steps for the augmented matrix as
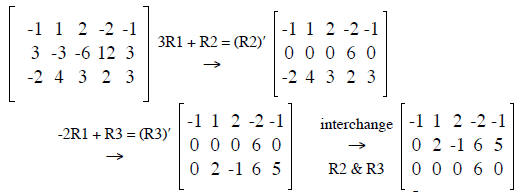
We read of the solution x4 = 0, x3 = s (a variable),.
We write this in vector form as
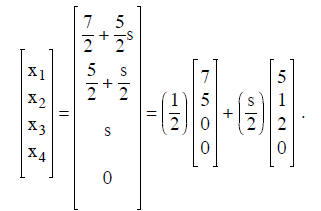
Since we are interested in the last expression for all
 ,
we may replace s/2 by t to get
,
we may replace s/2 by t to get
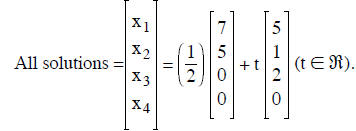
We see that

Instead of using a variable , we can generate a basis of the null space
numerically. Suppose that
the coefficient matrix A of the homogeneous system is taken to row reduced form
B. Suppose the
columns j1, … , jp are non pivot colunms. These columns take a variable in our
method of solution.
Instead of using a variable, we substitute alternately a single 1 and p - 1 0’s
for the coordinates, i.e., we
substitute (1, 0, 0, … , 0), (0, 1, 0, … , 0), (0, 0, 1, … , 0), … , (0, 0, 0, …
, 1) in the columns j1, … , jp
and read off the rest of the n - p coordinates for the pivot columns. We get p
vectors which will be a
basis for the kernel K. For example in our case, we use Gaussian elimination to
get
We then set the single nonpivot element x3 = 1 and read of the solutions as
x4 = 0, x3 = 1/2 and x1 =
5/2. So the vector v = (5/2, 1/2, 1, 0) is a basis of the Null Space of A.
EXAMPLE. Consider the system of equations
The augmented matrix is
and the solution can be read off as x4 = 2, x3 = 1 - x4 = -1, x2 = 2x3 + x4 =
0, and
x1 = (1/3)(x4 - x3 - 2x2) = 1. Here
The solution space of the associated homogeneous system is K = {0}, and thus,
the associated
homogeneous system only has the trivial solution 0. In general, when only the
solution xp is showing
in the solution, the solution of the associated homogeneous solution is only the
trivial solution.
| Prev | Next |