Foundations of Computational Math
Due date: 5PM Wednesday, 11/26/08
Grading: Since this overlaps with the assignment of Program 3, all of these
questions
will be graded based on effort.
Problem 8.1
Suppose
 is a symmetric positive definite tridiagonal matrix of the form
is a symmetric positive definite tridiagonal matrix of the form
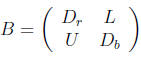
where n = 2k, Dr and Db are diagonal matrices of order n/2, L is a lower
triangular matrix
with nonzeros restricted to its main diagonal and its first subdiagonal, and U
is upper
triangular matrix with nonzeros restricted to its main diagonal and its first
superdiagonal.
Assume that Ax = b can be solved using Jacobi ’s method, i.e., the iteration
converges
acceptably fast. Partition each iterate xi into the top half and bottom half,
i.e.,
8.1.a. Assume an initial guess x0 is given and identify
what information, i.e., the pieces
of xi for 0≤i≤j,
determines the values found in the vectors  and
and
 for any j > 0.
for any j > 0.
8.1.b. Can the relationships from 8.1.a be used to design an iteration
that approximates
the solution essentially as well but only requires half of the work of Jacobi’s
method ?
8.1.c. Relate your new method from 8.1.b to applying Gauss-Seidel to
solve Bx = b
starting from the same initial guess x0.
Problem 8.2
8.2.a
Consider the two matrices :

Suppose you solve systems of linear equations involving A1 and A2
using Jacobi’s method.
For which matrix would you expect faster convergence?
8.2.b
Consider the matrix
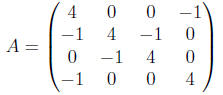
(i) Will Jacobi’s method converge when solving Ax = b?
(ii) Will Gauss-Seidel converge when solving Ax = b?
Problem 8.3
Consider solving a linear system Ax = b where A is symmetric positive definite using steepest descent.
(8.3.a) Suppose you use steepest descent without preconditioning . Show that
the residuals,
rk and rk+1 are orthogonal for all k.
(8.3.b) Suppose you use steepest descent with preconditioning . Are the
residuals, rk
and rk+1 are orthogonal for all k? If not is there any vector from
step k that is
guaranteed to be orthogonal to rk+1?
Problem 8.4
Let f(x) = x^3 − 3x + 1. This polynomial has three distinct roots
(8.4.a) Consider using the iteration function
Which, if any, of the three roots can you compute with
 and how would you
and how would you
choose x(0) for each computable root?
(8.4.b) Consider using the iteration function
Which, if any, of the three roots can you compute with
 and how would you
and how would you
choose x(0) for each computable root?
(8.4.c) For each of the roots you identified as computable
using either
or ,
apply the iteration to find the values of the roots . (You need not turn in any
code, but using a simple program to do this is recommended.)
8.4.d
Let  be a continuous
function. Show that if
be a continuous
function. Show that if  is a contraction
mapping
is a contraction
mapping
on [a, b] then the sequence {x(k)} defined by x(k+1) =
 is a Cauchy sequence.
is a Cauchy sequence.
| Prev | Next |